Rita Laezza

Index:
PhD project
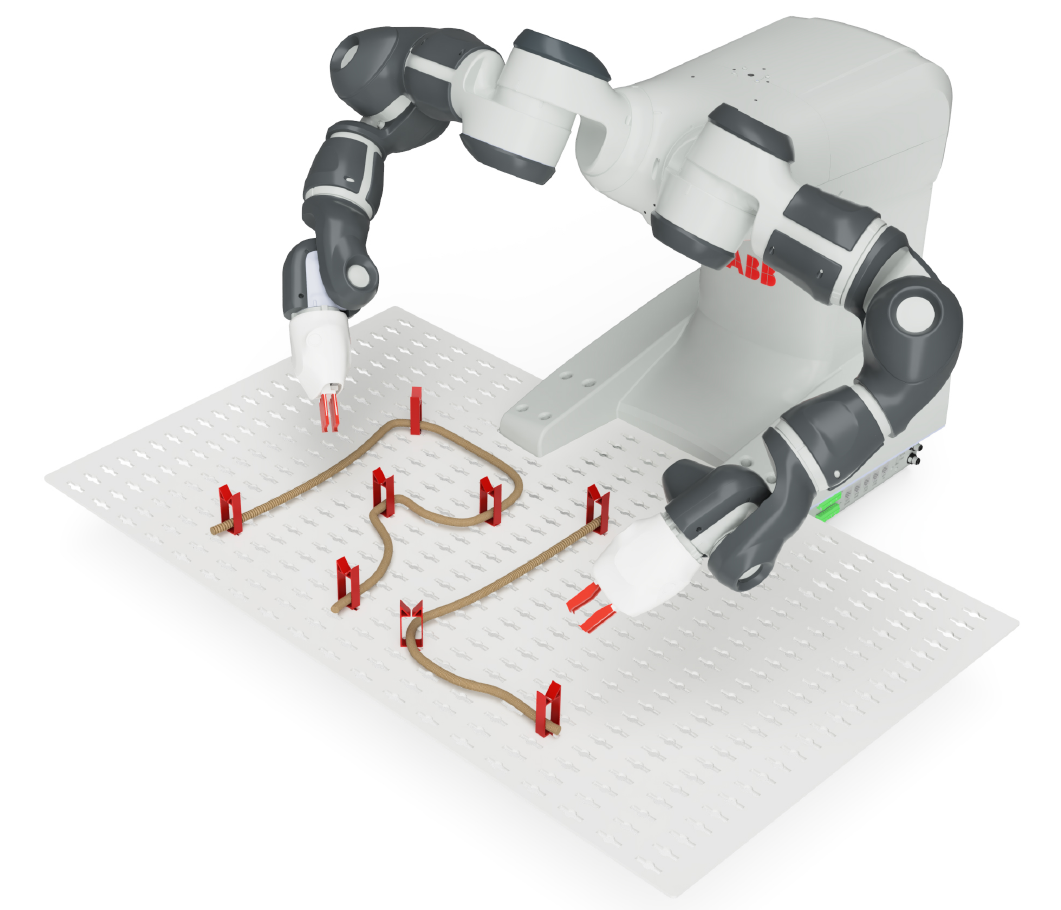
Modern robotic applications require handling of deformable objects. In industrial settings, a multitude of deformable objects are handled on a daily basis, ranging from linear objects such as cables and wires that have to be installed on electronic devices; to planar objects like sheets of metal which can be cut and molded; to volumetric objects made for example of foam materials which can be applied as padding for insulation purposes. Outside industrial settings, there are numerous other potential applications of deformable object manipulation, in fields ranging from agriculture to medicine. The main goal of my research project is to address such robotic manipulation problems by combining (i) data-driven modeling of robot-object interaction based on Deep Neural Networks and vision/force data, and (ii) design of control policies based on Reinforcement Learning principles.
PhD supervisors
Main Supervisor: Yiannis Karayiannidis
Co-Supervisor: Florian T. Pokorny
Graduate courses
- Autonomous Systems (WASP)
- Deep learning and GANs (WASP)
- Learning Theory and Reinforcement Learning (WASP)
- Scalable Data Science and Distributed Machine Learning (WASP)
- Graphical Models, Bayesian Learning and Statistical Relational learning (WASP)
- Artificial Intelligence and Society: Ethical, Legal, Societal and Economical Aspects of AI (WASP)
- Research on the Frontier Between Engineering and Health (GU)
- Machine Learning in Optimal Control (Chalmers)